Generalized coordinates
Newton's laws can be difficult to apply to many kinds of motion because the motion is limited by
constraints.
For example, a bead on an abacus is constrained to move along its wire
and a pendulum bob is constrained to swing at a fixed distance from the
pivot. Many such constraints can be incorporated by changing the normal
Cartesian coordinates to a set of
generalized coordinates that may be fewer in number.
[17] Refined mathematical methods have been developed for solving mechanics problems in generalized coordinates. They introduce a
generalized momentum, also known as the
canonical or
conjugate momentum, that extends the concepts of both linear momentum and
angular momentum. To distinguish it from generalized momentum, the product of mass and velocity is also referred to as
mechanical,
kinetic or
kinematic momentum.
[6][18][19] The two main methods are described below.
Lagrangian mechanics
In
Lagrangian mechanics, a Lagrangian is defined as the difference between the
kinetic energy T and the
potential energy V:

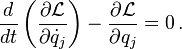
If the generalized coordinates are represented as a vector
q = (q1, q2, ... , qN) and time differentiation is represented by a dot over the variable, then the equations of motion (known as the Lagrange or
Euler–Lagrange equations) are a set of
N equations:
[20]
If a coordinate
qi is not a Cartesian coordinate, the associated generalized momentum component
pi does not necessarily have the dimensions of linear momentum. Even if
qi is a Cartesian coordinate,
pi will not be the same as the mechanical momentum if the potential depends on velocity.
[6] Some sources represent the kinematic momentum by the symbol
Π.
[21]
In this mathematical framework, a generalized momentum is associated
with the generalized coordinates. Its components are defined as

Each component
pj is said to be the
conjugate momentum for the coordinate
qj.
Now if a given coordinate
qi does not appear in the Lagrangian (although its time derivative might appear), then

This is the generalization of the conservation of momentum.
[6]
Even if the generalized coordinates are just the ordinary spatial
coordinates, the conjugate momenta are not necessarily the ordinary
momentum coordinates. An example is found in the section on
electromagnetism.
Hamiltonian mechanics
In
Hamiltonian mechanics,
the Lagrangian (a function of generalized coordinates and their
derivatives) is replaced by a Hamiltonian that is a function of
generalized coordinates and momentum. The Hamiltonian is defined as

where the momentum is obtained by differentiating the Lagrangian as above. The Hamiltonian equations of motion are
[22]

As in Lagrangian mechanics, if a generalized coordinate does not
appear in the Hamiltonian, its conjugate momentum component is
conserved.
[23]
Symmetry and conservation
Conservation of momentum is a mathematical consequence of the
homogeneity (shift
symmetry) of space (position in space is the
canonical conjugate
quantity to momentum). That is, conservation of momentum is a
consequence of the fact that the laws of physics do not depend on
position; this is a special case of
Noether's theorem.
[24]
Tidak ada komentar:
Posting Komentar